Plošný spoj je navržen přednostně pro realizaci jednoduchého robotického vozítka. Kromě dvou DC motorků může ovládat i dva malé přesné krokové motory a tři serva. Ale ukázalo se, že velmi dobře slouží jako univerzální rozhraní pro ESP32 k celé řadě dalších projektů. Zatím testujeme možnost osadit si jí podle potřeby – proto jsou součástky „větší“ (integrované obvody v DILu) – ale předpokládme, že v případě zájmu nabídneme i variantu už osazenou, to pak přejdeme na SMD.
(Počítáme například i s projektem souřadnicového plotteru – krokové motory x/y / servo pen_up/pen_down, jako jednoduché „kreslítko“).
Je možno jí využít i pro základní projekty s ESP32 (bez nutnosti použití mechatronické části)
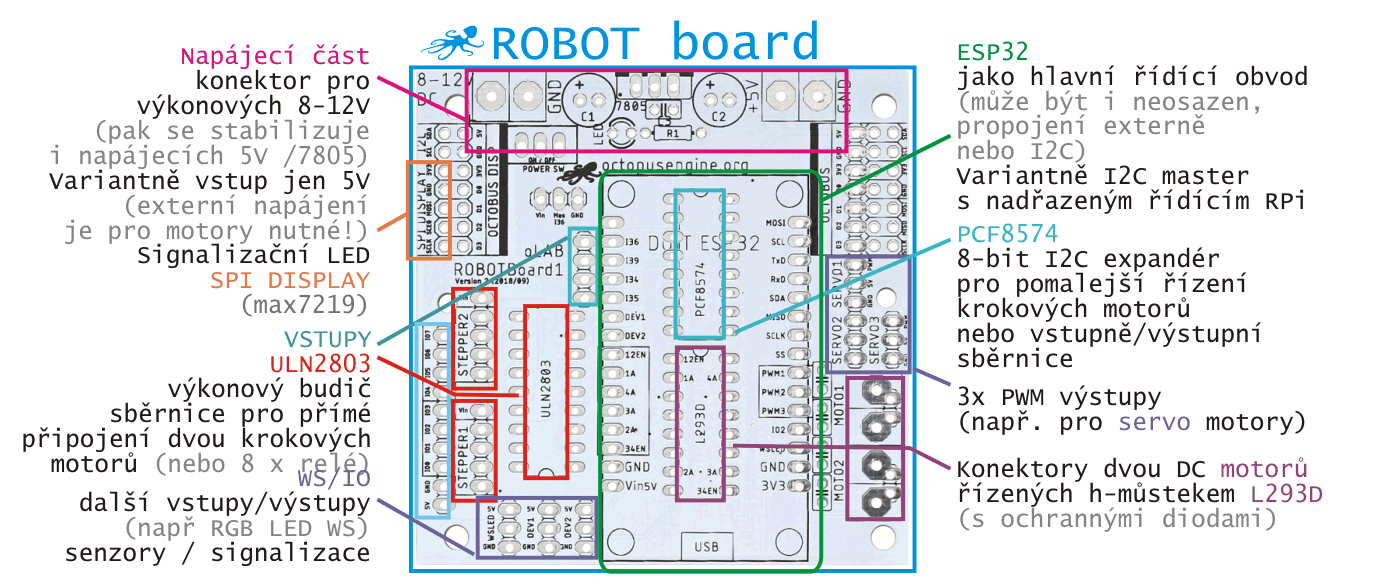
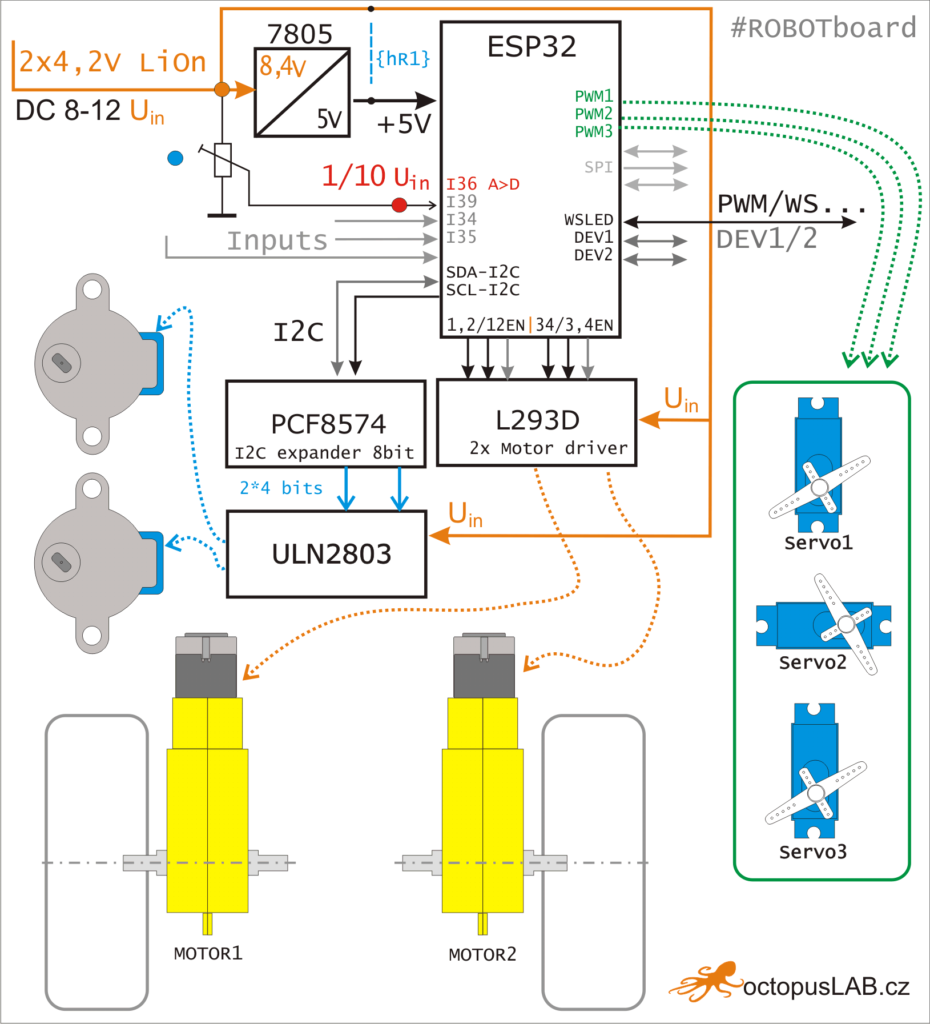
Na desku lze osadit: (► návod na osazení)
stabilizátor 7805 – pro řídící elektroniku (při externím výkonovém napájení jiném, než 5V)
řadič H-můstek L293D – pro dva stejnosměrné mororky (5-8V) nebo serva
expandér PCF8574 – 8bit / možno vstupně výstupní
budič sběrnice ULN2803 – pro dva krokové motory
3 pin konektory pro napojení 3x PWM pro servo i čidla
3 pin konektory – 3x one wire – pro teploměr Dallas / WS RGB LED / …
2x7pin konektor – zprava plný OCTOBUS (napájení/I2c/SPI/D0-D4)
/5pin konektor – zleva I2C a SPI displej (MAX7219)
Samozřejmě také universální sběrnici octoBUS.
Pinout pro Micropython:
oeLAB-esp32 (DoIt) 2x15 pins: [ROBOT Board]:
----------- (GPIO)
EN - - D23 (23) MOSI [SPI_MOSI_PIN]
[PIN_ANALOG] (36) VP - - D22 (22) SCL(I2C) [I2C_SCL_PIN]
[I39_PIN] (39) VN - - TXD (1) D2
[I34_PIN] D34 - - RXD (3) D3
[I35_PIN] D35 - - D21 (21) SDA(I2C) [I2C_SDA_PIN]
[ONE_WIRE_PIN] DEV1 D32 - - D19 (19) MISO [SPI_MISO_PIN]
DEV2 D33 - (ESP32) - D18 (18) SCLK [SPI_CLK_PIN]
[MOTOR_12EN] D25 - - D5 (5) CS0 [SPI_CS0_PIN]
[MOTOR_1A] D26 - - TX2 (17) [PIN_PWM1] /Servo1
[MOTOR_4A] D27 - - RX2 (16) [PIN_PWM2] /Servo2
[MOTOR_3A] D14 - - D4 (4) [PIN_PWM3] /Servo3
[MOTOR_2A] D12 - - D2 (2) [BUILT_IN_LED]
[MOTOR_34EN] D13 - - D15 (15) [WS_LED_PIN] //v1(13)
GND - - GND
VIN - - 3V3 +
-----------
Na videu vidíte první hrubý pokus (diskrétní snímání, bez regulace) a další verze už trochu vylepšený FW (při zachování HW)
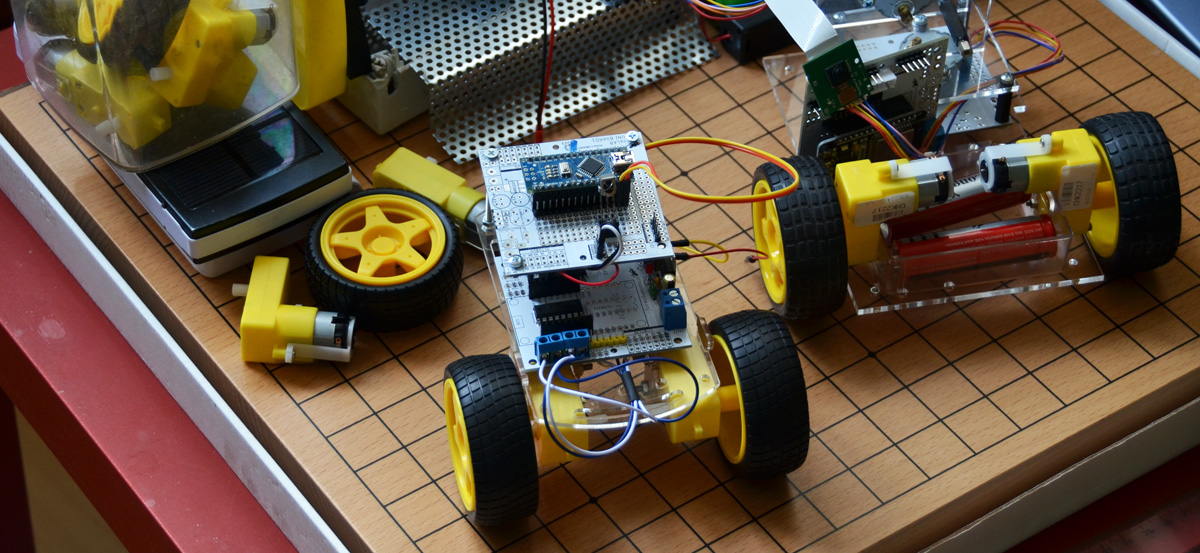
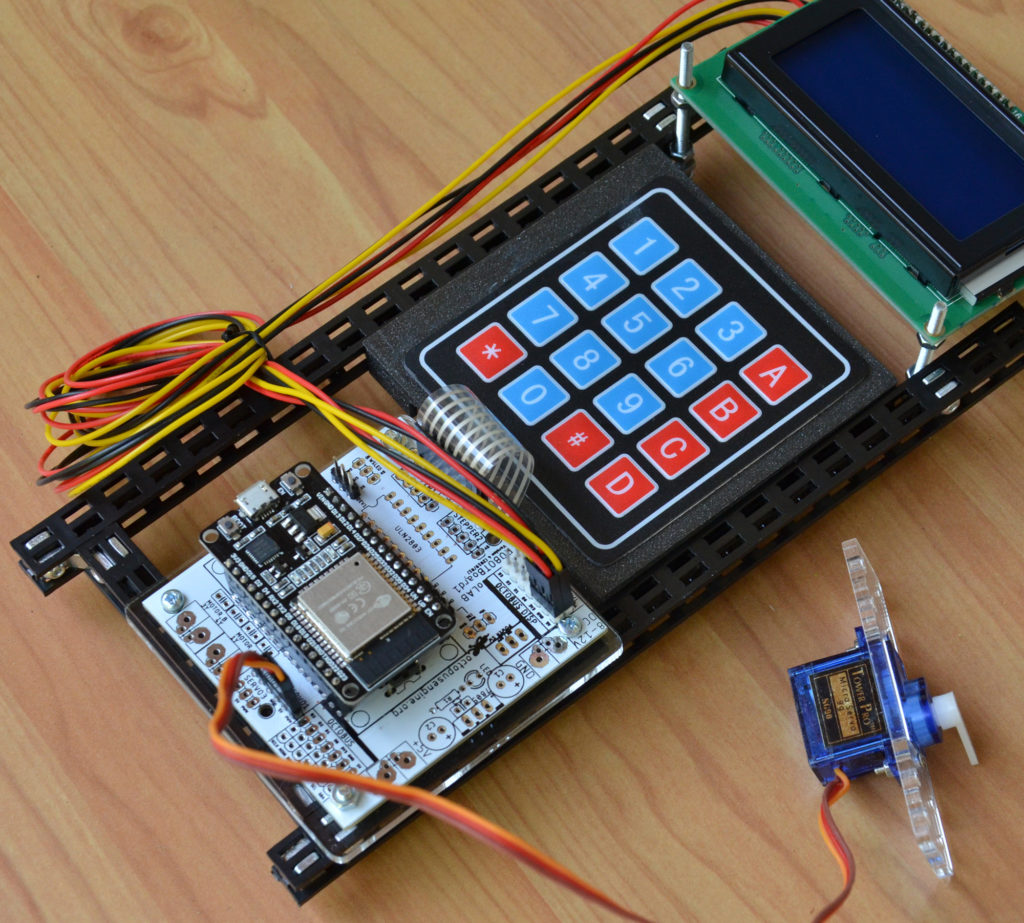
Prototypy robotických vozítek. Vlevo – k řízení použito Arduino NANO, vpravo ESP32 ►►
Proč ESP32?
V současné době se většina jednoduchých malých robotů staví pořád na Arduinu (ATmega328: 16MHz, 32kB flash, 2 kB RAM) – pro srovnání ESP32 má 240Mhz, 16MB flash, 520kB RAM – a cenově je levnější, než Arduino originál. A to se vyplatí 🙂
Na githubu máme přímo pro esp32 a tuto desku přichystáno několik velmi jednoduchých ukázkových programů: (v prostředí C-Arduino ICE, některé části postupně převádíme pod ► MicroPython)
ROBOTboard – ESP32 – testování ultrazvukového dálkoměru ►►
https://www.instagram.com/p/Bn1J88kgP2R/?taken-by=octopusengine
30. září se koná v PP závod robotů – my zkusíme v šibeničním termínu postavit první robotické vozítko – robota, který by to mohl alespoň zvládnout projet ► octopus R01
Další vybrané projekty:
► octopus R03 (kovové tělo)
► DrawBOT (dvě serva)
► PolarGRAPH (dva krokové motory)
…