Naše první robotická vozítka s deskou ROBOTboard měla plastové šasi:
https://www.octopuslab.cz/projekt-r01/ – ke stažení na tkingiverse:
https://www.thingiverse.com/thing:3513640
Pro serióznější používání se značná křehkost plastu jeví jako jistý problém. Budeme je používat dál (zatím se nám zlomil jen kousek u jednoho z pěti robotů) ale jdeme dál…
Chtěli jsme zkustit i „lepší a pevnější tělo“ a při návštěvě u kamaráda z postavrobota.cz mě zaujal tento kovový podvozek:
https://www.postavrobota.cz/Stavebnice-podvozku-robota-2-kola-d1521.htm
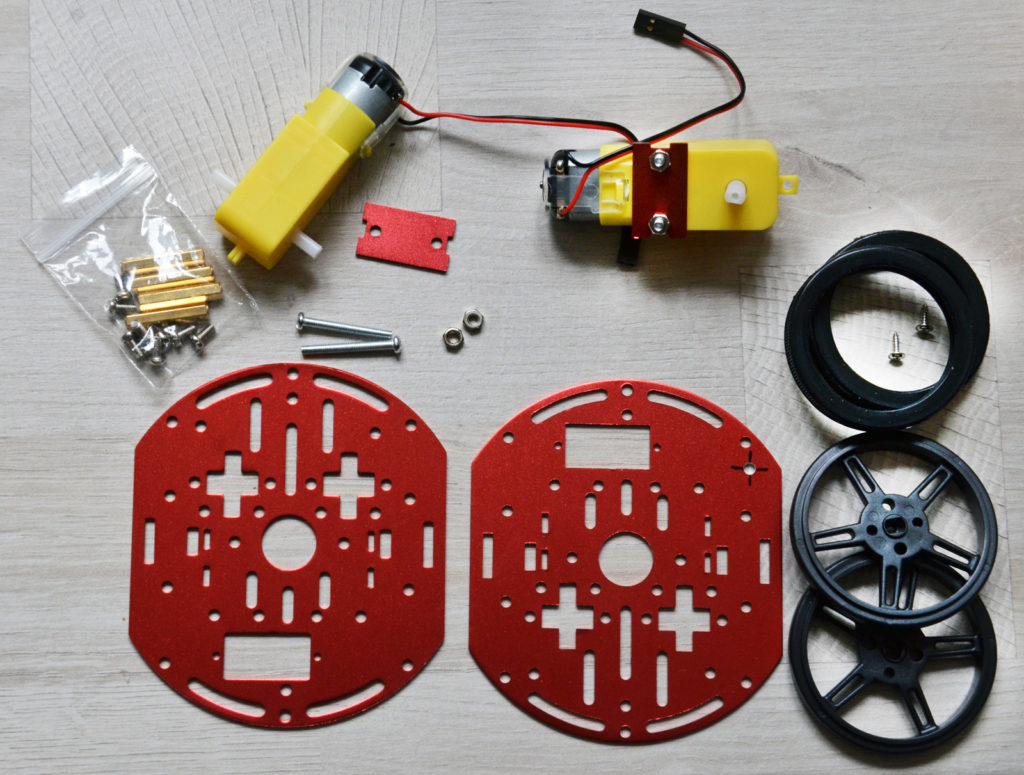
- dva kovové díly přes mosazné distanční sloupky tvoří tuhý díl
- kolečka mají „gumy“ opravdu gumové, oproti běžným plastovým tolik nekloužou
- snadná montáž – podle obrázku stačí využít jen předvrtané otvory a po „utažení“ cca 15ti štoubků je základ hotov
- škoda jen, že se do „podpalubí“ nevejde naše oblíbená dvojice LiOn akumulátorů
- udělali jsem pár kosmetických úprav a další v plánu jsou 3D plastové „interface“ pro snadnější montáž
Mechanická konstrukce
a pro pevnější uchycení desky elektroniky jme přidali jednu 3mm dírku (na obrázku také patrno ze záměrného křížku)
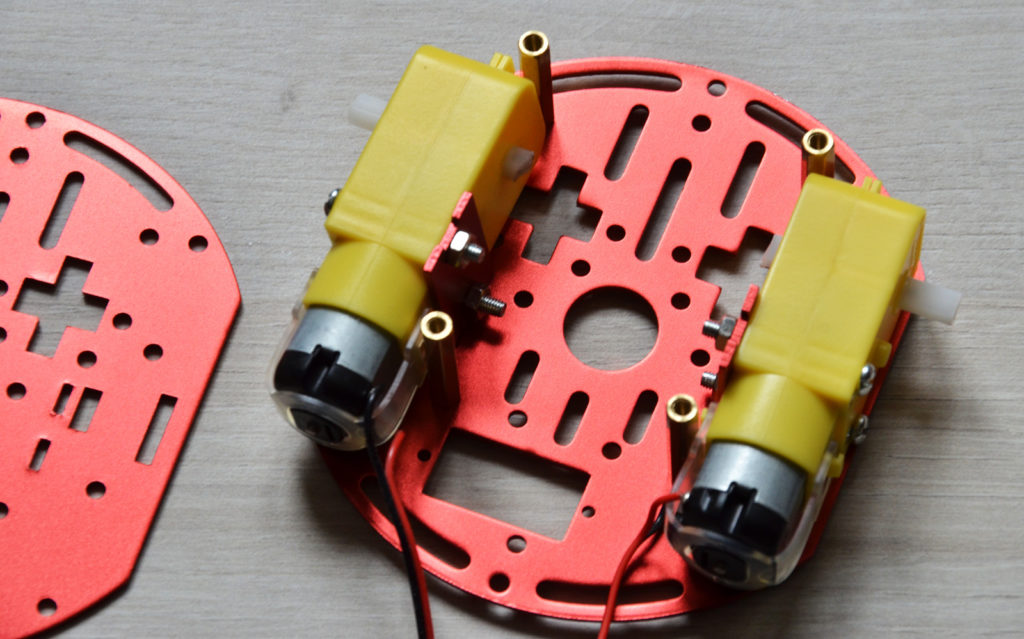
a po sesazení / zaklopení / sešroubování – je základ hotov
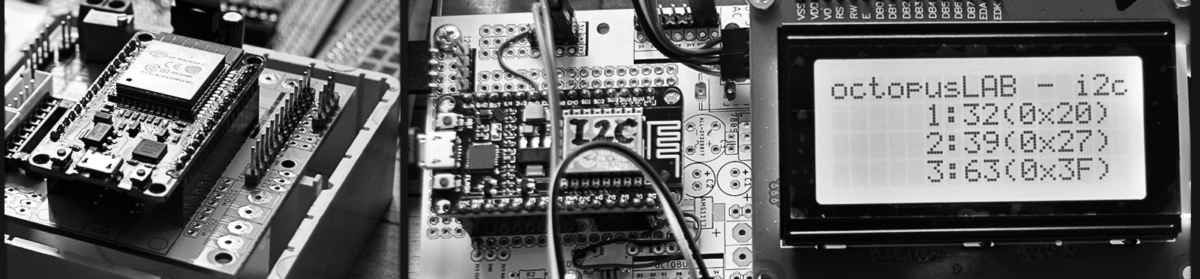
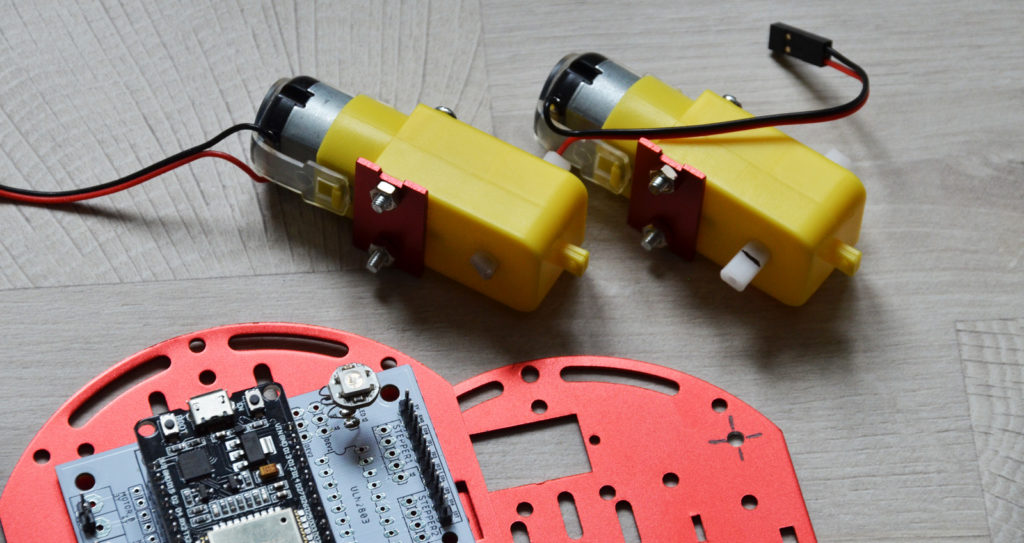
Elektronika
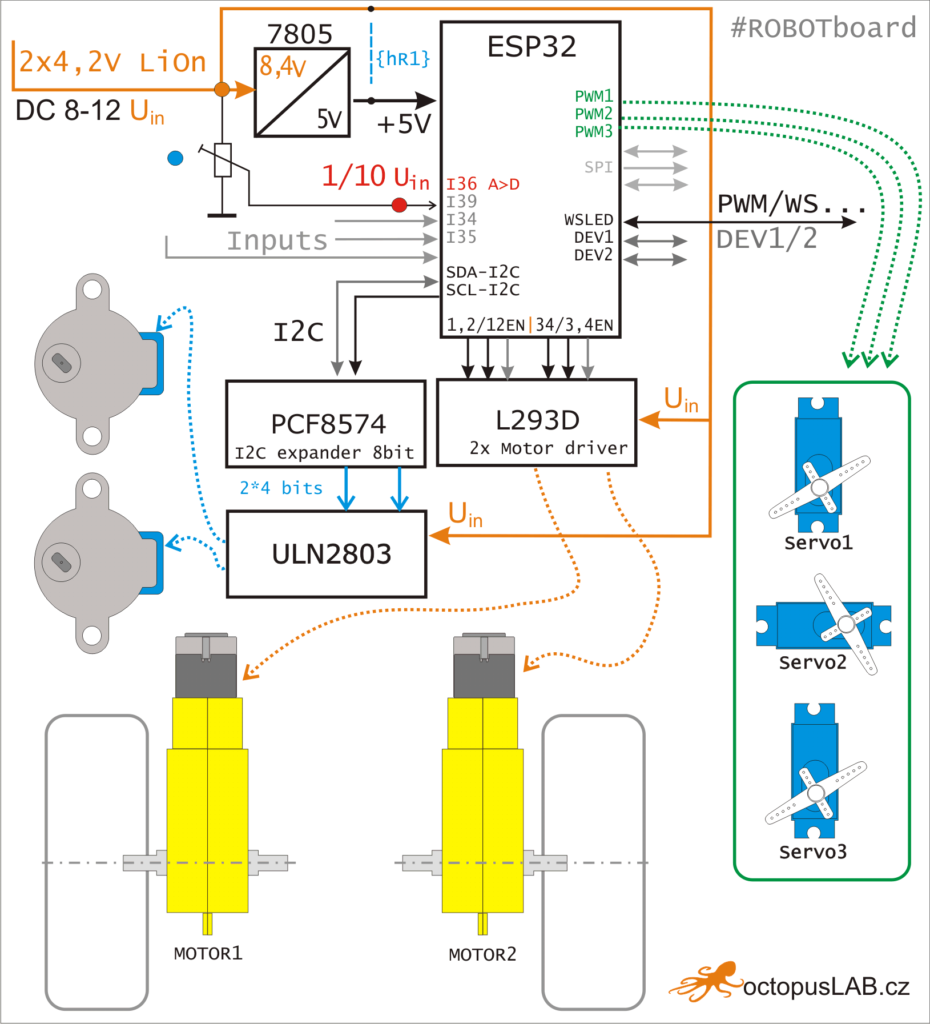
dva základní DC (žluté největší)
Využíváme desku ROBOTboard – pokud jí nemáte osazenou, postupujte podle návodu na osazení
Ukázky programů
pro základ (v Arduino C) lze použít verzi z 01 >
https://github.com/octopusengine/octopuslab/tree/master/projects/robot-r01
a základní sledovač čáry:
https://github.com/octopusengine/robot03-line-following
testujeme pokročilý sledovač čáry s dálkovým ovládáním (pro kybernetickou autordáhu „průmyslu 5.0“) ve spolupráci s http://www.robici.cz/