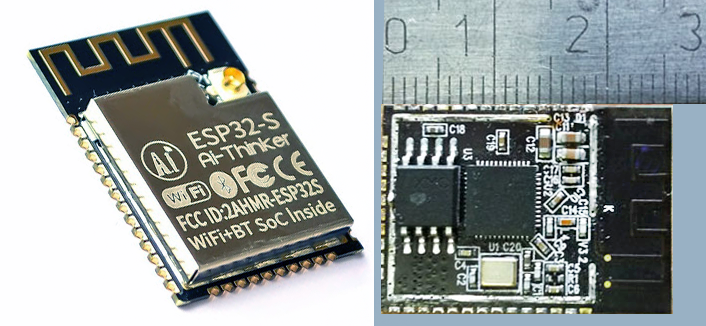
Na destičce o velikosti poštovní známky je miniaturní počítač (mikrokontrolér) spolu s několika klíčovými komponenty včetně krystalu, leptané antény WiFi a Bluetooth. Tím usnadňují použití konektivitu mikrokontroléru a jsou okamžitě připraveny k integraci do koncových produktů.
ESP32 má:
- dvě CPU jádra s nastavitelnou taktovací frekvencí do 240 MHz
- klasické Bluetooth i podporu Bluetooth Low Energy (BLE)
- 4MB Flash paměť
- 3 bloky paměti RAM v celkové velikosti 520kB
- periferie zahrnují kapacitní dotykové senzory, Hallův snímač, zesilovač s nízkým šumem, rozhraní pro SD kartu, Ethernet, vysokorychlostní SPI, UART, I2S a I2C
Takže má dostatečný výkon, aby na něm mohl běžet i robustnější systém, jako je Micropython.
Moduly s ESP32, které používáme
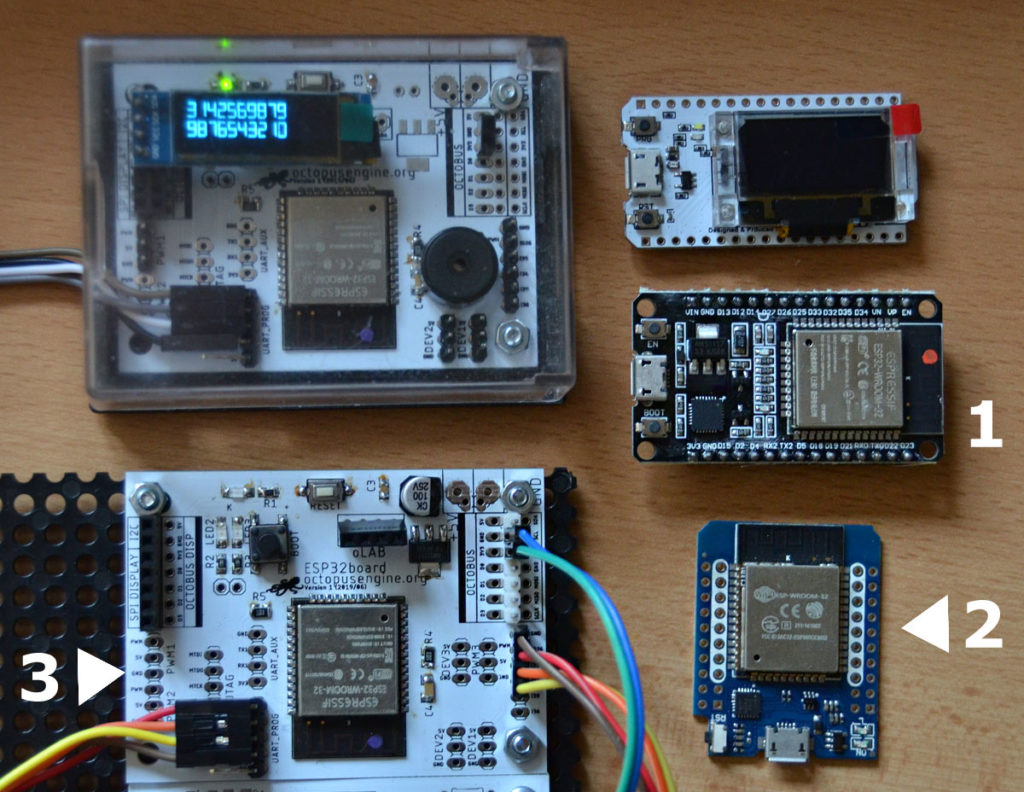
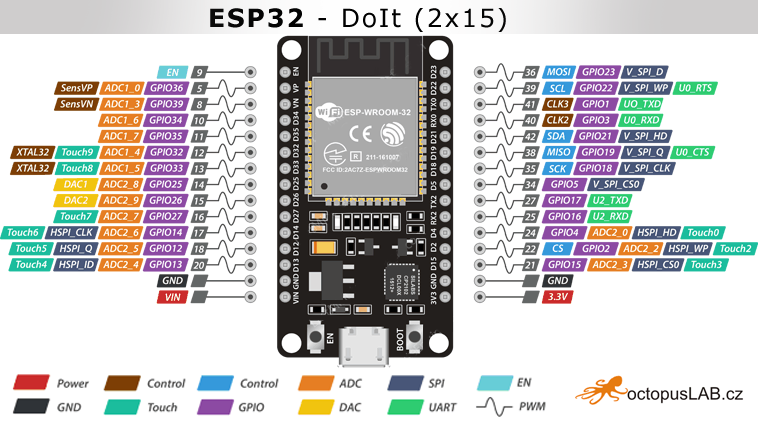
- Modul ESP32 – DoIt (2×15) – na desce RobotBoard je základem EDU_KIT1 (1)
- ESP32board – v tuto chvíli naše nová „vlajková loď“, která se dá rozšířit i o větší paměť a plánujeme pro ní řadu hardwarových „shieldů“ – a tvoří podstatnou část EDU_KIT2 (3)
- DOIT adapter – je zmenšená (a odlehčená) verze ROBOT boardu
- ESP32 Wemos (2x 2×10) – už nepoužíváme (2)
Základní údaje:
oeLAB-esp32 (DoIt) 2x15 pins: [ROBOT Board]:
----------- (GPIO)
EN - - D23 (23) MOSI [SPI_MOSI_PIN]
[PIN_ANALOG] (36) VP - - D22 (22) SCL(I2C) [I2C_SCL_PIN]
[I39_PIN] (39) VN - - TXD (1) D2
[I34_PIN] D34 - - RXD (3) D3
[I35_PIN] D35 - - D21 (21) SDA(I2C) [I2C_SDA_PIN]
[ONE_WIRE_PIN] DEV1 D32 - - D19 (19) MISO [SPI_MISO_PIN]
DEV2 D33 - (ESP32) - D18 (18) SCLK [SPI_CLK_PIN]
[MOTOR_12EN] D25 - - D5 (5) CS0 [SPI_CS0_PIN]
[MOTOR_1A] D26 - - TX2 (17) [PIN_PWM1] /Servo1
[MOTOR_4A] D27 - - RX2 (16) [PIN_PWM2] /Servo2
[MOTOR_3A] D14 - - D4 (4) [PIN_PWM3] /Servo3
[MOTOR_2A] D12 - - D2 (2) [BUILT_IN_LED]
[MOTOR_34EN] D13 - - D15 (15) [WS_LED_PIN] //v1(13)
GND - - GND
VIN - - 3V3 +
-----------
240 MHz dual core Tensilica LX6 microcontroller with 600 DMIPS
Integrated 520 KB SRAM
Integrated 802.11 b/g/n HT40 Wi-Fi transceiver, baseband, stack and LWIP
Integrated dual mode Bluetooth (classic and BLE)
16 MB flash, memory-mapped to the CPU code space
2.3V to 3.6V operating voltage
-40°C to +125°C operating temperature
On-board PCB antenna / IPEX connector for external antenna
Sensors
Ultra-low noise analog amplifier
Hall sensor
10x capacitive touch interfaces
32 kHz crystal oscillator
34x GPIO
3 x UARTs, including hardware flow control
3 x SPI
2 x I2S
12 x ADC input channels
2 x DAC
2 x I2C
PWM/timer input/output available on every GPIO pin
OpenOCD debug interface with 32 kB TRAX buffer
SDIO master/slave 50 MHz
Supports external SPI flash up to 16 MB
SD-card interface support
Security Related
WEP, WPA/WPA2 PSK/Enterprise
Hardware accelerated encryption: AES/SHA2/Elliptical Curve Cryptography/RSA-4096
Performance
Supports sniffer, Station, SoftAP and Wi-Fi direct mode
Max data rate of 150 Mbps@11n HT40, 72 Mbps@11n HT20, 54 Mbps@11g, and 11 Mbps@11b
Maximum transmit power of 19.5 dBm@11b, 16.5 dBm@11g, 15.5 dBm@11n
Minimum receiver sensitivity of -98 dBm
135 Mbps UDP sustained throughput
5 ?A power consumption in deep sleep
Poznámky k instalaci a zprovoznění:
Arduino C
a) https://navody.arduino-shop.cz/navody-k-produktum/vyvojova-deska-esp32.html
https://github.com/espressif/arduino-esp32
b) soubor/vlastosti//správce dalších desek:
https://dl.espressif.com/dl/package_esp32_index.json
manažér desek – ESP – by Esperessif System DOIT ESP DEV KIT V1 [2018/07-Win10-ok]
Micropython
► MicroPython – samostatná stránka se věnuje základům (od zprovoznění až k prvním testům) – ale pro samotnou instalaci a veškerou dokumentaci včetně ukázek a tutoriál, máme samostatnou platformu: docs.octopuslab.cz
Na desce ROBOT board jsou realizována základní zapojení podle ukázek v githubu (zde bez pohybové mechatronické části).
Vybrané nástroje pro práci s ESP
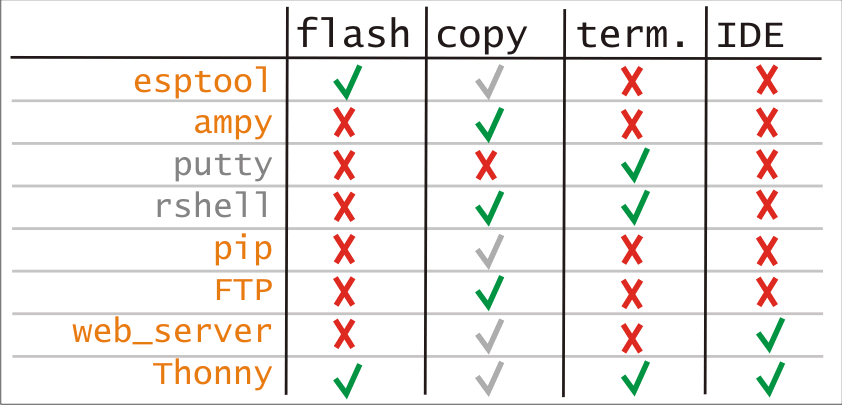
Podrobněji na samostatné stránce: https://www.octopuslab.cz/prace-s-esp/