Toto je první ze tří úvodních seznamovacích kurzů.
Pro základní pokusy s Micropythonem na ESP32 potřebujete „pouze“:
modul ESP32, do kterého si „naflashujete“ Micropython – což je pro mnohé začátečníky na delší dobu tou nejnáročnější částí kurzu.
Pro ulehčení další práce (a v některých ukázkách nezbytností) máme připravenou nadstavbu octopus(), kterou si společně s Micropythonem nahrajete a nakonfigurujete podle následujícího odkazu:
https://www.octopuslab.cz/micropython-octopus/
Připravujeme: Další možností bude objednat si už nachystaný modul ESP se základním firmware a ukázkovým software.


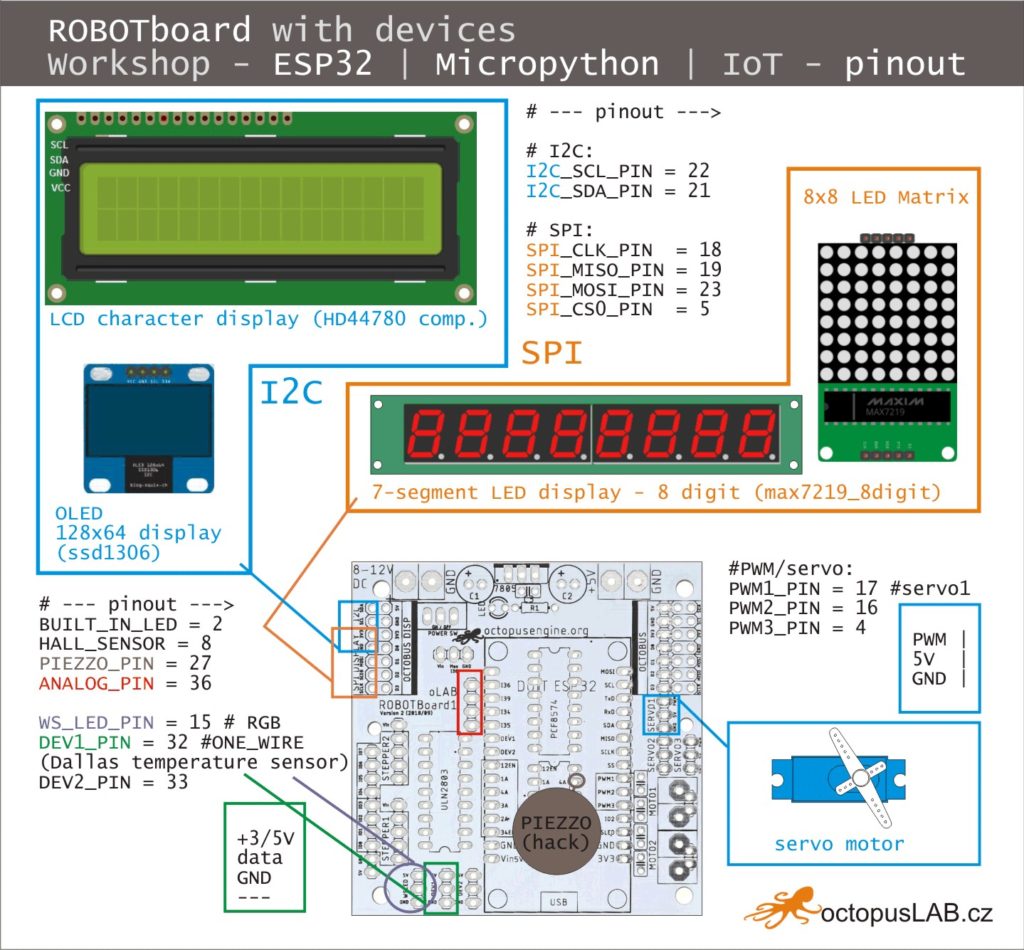
Doplňkové informace o nastavení PINů - jak máme v ukázkách použity:
oeLAB-esp32 (DoIt) 2x15 pins: [ROBOT Board]:::
----------- (GPIO)
EN - - D23 (23) MOSI [SPI_MOSI_PIN]
[PIN_ANALOG] (36) VP - - D22 (22) SCL(I2C) [I2C_SCL_PIN]
[I39_PIN] (39) VN - - TXD (1) D2
[I34_PIN] D34 - - RXD (3) D3
[I35_PIN] D35 - - D21 (21) SDA(I2C) [I2C_SDA_PIN]
[ONE_WIRE_PIN] DEV1 D32 - - D19 (19) MISO [SPI_MISO_PIN]
T8 DEV2 D33 - (ESP32) - D18 (18) SCLK [SPI_CLK_PIN]
[MOTOR_12EN] D25 - - D5 (5) CS0 [SPI_CS0_PIN]
[MOTOR_1A] D26 - - TX2 (17) [PIN_PWM1] /Servo1
[MOTOR_4A] T7 D27 - - RX2 (16) [PIN_PWM2] /Servo2
[MOTOR_3A] T6 D14 - - D4 (4) T0 [PIN_PWM3] /Servo3
[MOTOR_2A] T5 D12 - - D2 (2) T2 [BUILT_IN_LED]
[MOTOR_34EN] T4 D13 - - D15 (15) T3 [WS_LED_PIN] //v1(13)
GND - - GND
VIN - - 3V3 +
-----------
Základní ukázky a experimentování se provádí v interaktivním modu.
To znamená, že mikrokontrolér vykonává přímo příkazy psané v Pythonu (aniž by je kompiloval) a ke komunikaci využíváme „terminál“ / příkazové řádky: putty nebo screen (Linux)
Někdy potřebujeme jednoduchý ovladač – USB>UART)
- výhoda: jednoduché, nemusí se kompilovat a hned běží
- nevýhoda: drží se v paměti jen po dobu napájení, po vypnutí se vše „zapomene“ – a tak není vhodné pro složitější programy nebo větší projekty s více soubory.
Řešení: programovat mimo kontroler a až pak program nahrát jako soubor nebo spustit přes ampy run, případně přes webrepl.
Většina našich zdrojových kódů je aktualizována na:
https://github.com/octopusengine/octopuslab/tree/master/esp32-micropython
Možná vám je znám fakt, že pokud psaní kódu trvá jednotku času, tak jeho testování a odladění trvá minimálně trojnásobek času – a sepsání dokumentace je někdy ještě náročnější.
Navíc se jedná o nekončící proces vývoje, kdy se průběžně obměňuje část knihoven a ukázek… proto prosíme o shovívavost – a když už naleznete nějakou nesrovnalost, budeme vám vděčni, pokud nás na ní upozorníte. Samozřejmě že i spolupracovníky a další tvůrce velmi přivítáme.
Jednotlivé ukázky se v mezích možností snažíme dělit na:[Základy] Jedním nebo občas i několika po sobě jdoucími příkazy pouze "komandujeme" ESP mikrokontroler s připojenými periferiemi. Jedná se o základní "početní úkony" a jednoduché metody práce s HW, ovládání LED (svítivé diody), RGB (barevné diody), piezo, jednoduchý podprogram...
[Lehce pokročilejší] HW: Displeje a základní čidla... a mechatronika: servo motor SW: Podrobnější vysvětlení (větvení programu - podmínka, cyklus, ...) > jednoduché projekty, hry a aplikace.
[Poznámka] ...nebo tak.
[Zajímavost] Tady by to mohlo být modré celé
[Pozor!] Nechceme nikoho stresovat, proto to moc nevyužijeme :-P
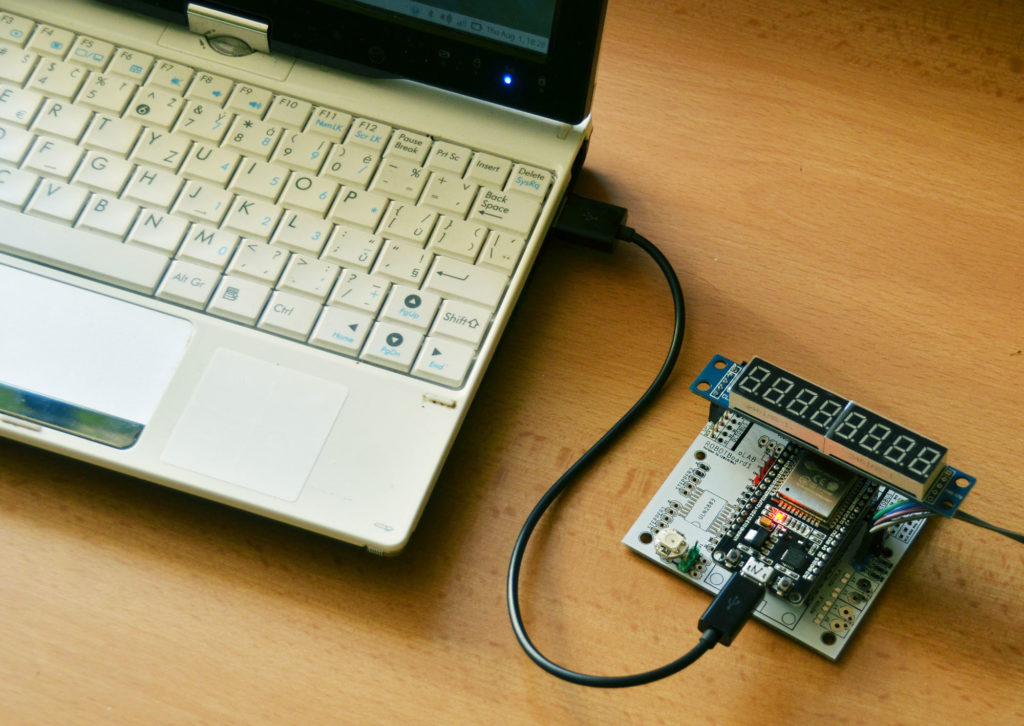
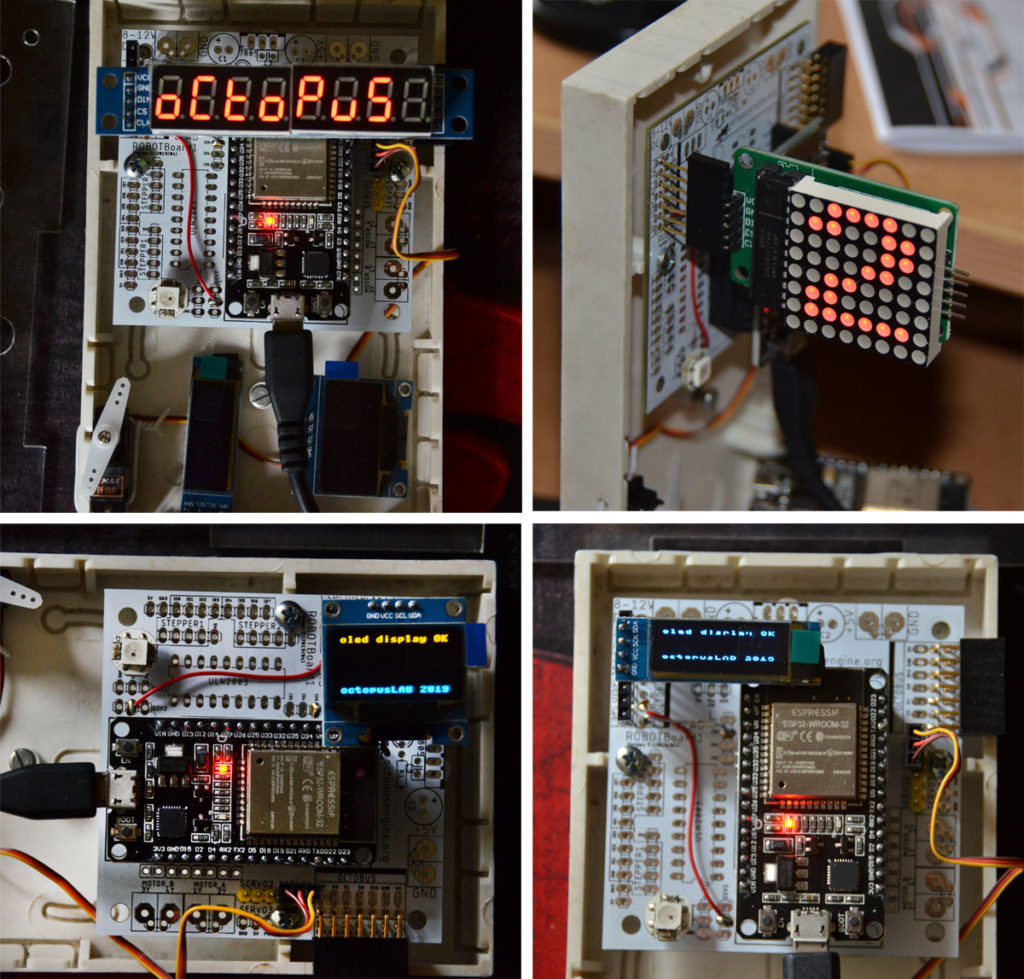
Připojení
- v prvním díle pouze po sériové lince pomocí USB kabelu
(hned ve druhém pokračování zkusíme webrepl) - počítač slouží pouze jako „terminál“ – všechno se děje v mikrokontroléru ESP32, který s námi komunikuje po sériové lince
- proto potřebujeme převodník USB > UART
(Tato svítivá dioda nás pouze informuje o tom, že je připojeno napájení a svítí po celou dobu)
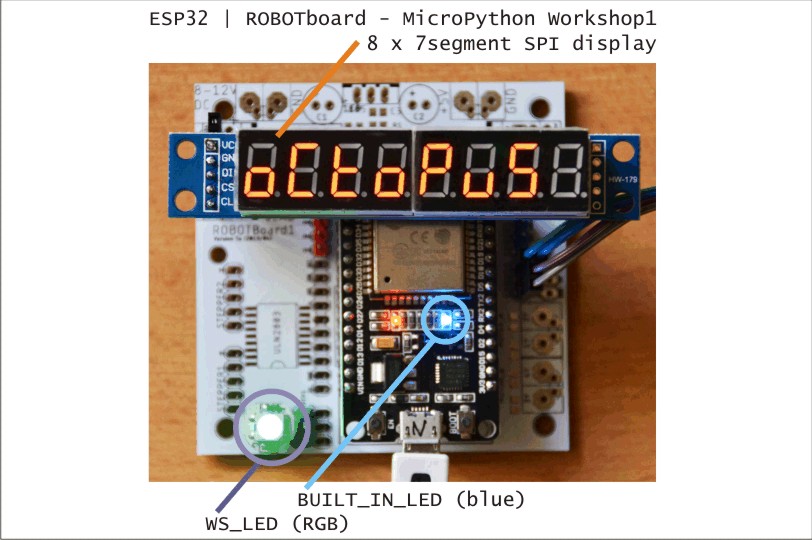
Tlačítko boot se dá také použít – což si ukážeme v dalším díle.
První spuštění
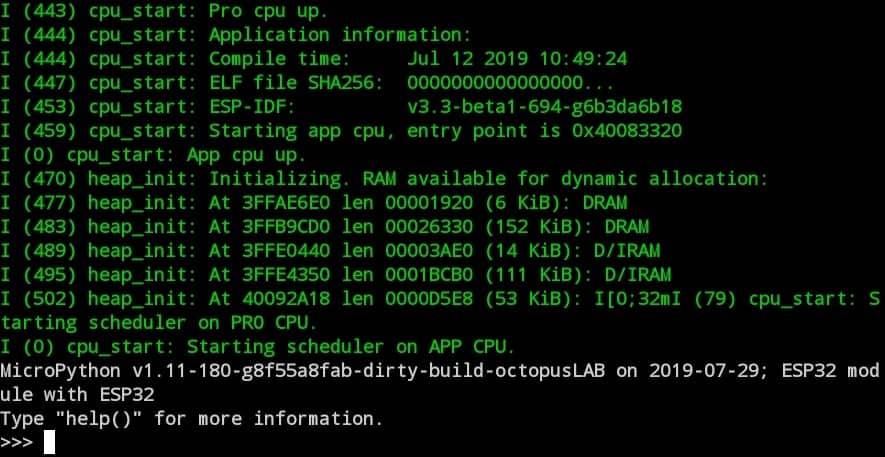
Po restartu nám ESP32 posílá do našeho počítače na terminál první zprávy. Zeleně jsou systémové inforamce, které nás v tuto chvíli nezajímají. Po stisknuté CTL+C uvidíme verzi Micropythonu MicroPython v1.11-180-g8f55a8fab-dirty-build-octopusLAB on 2019-07-29; module with ESP32 Type "help()" for more information.
Nastavení
Pokud máme ESP již připraveno (to znamená, že je tam nahraný Micropython i základní octopus systém). Je nutno pouze individuálně nakonfigurovat podle HW požadavků (a možností) a donastavit některé další drobnosti – např. připojení k WiFi.
Rovnou si zkusíme
Toto není výuka Micropythonu – ale jen ukázky a experimenty s přihlédnutím na interakci s vybraným HW
> pro podrobnější proniknutí do tajů programování v Pythonu doporučujeme: https://naucse.python.cz/
> https://naucse.python.cz/course/mi-pyt/intro/micropython/
> http://howto.py.cz/index.htm
Velmi stručně o Pythonu:
- logické členění se provádí pomocí striktního odsazování bloků
- pozor na závorky u metod a funkcí > print(„řetězec“) a uvozovky pro takzvané řetězce (shluky písmen, co nejsou číslo)
- pozor na dvojtečku za deklarací funkce, cyklu nebo podmínky:
def fce(parametr):
… co se má dělat
if (podmínka):
… co se má dělat při splněné podmínce
while True: > toto je nekonečná smyčka
… dělej, dokud je splněna podmínka
zde: pořád
HW hello world -> LED
Rozsvícení LED diody > ovládání / blikání
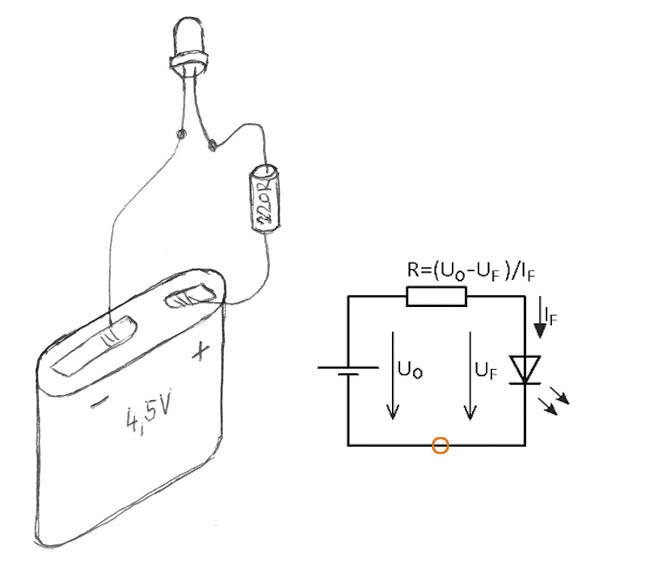
Pro rozpojování nebo spojování obvodu se použije spínač – ale co když chceme ovládat zařízení na dálku? Nebo chceme, aby LED „sama“ pravidelně“ blikala? Nebo aby se rozsvítila, když se setmí?
Inicializace knihovny pro práci s HW
Modul/knihovna octopus() je základní rozšíření Micropythonu pro práci s octopusLAB moduly a připojenými periferiemi. Zjednoduší uživateli nastavení (již provedeno v setup() - a zpřehlední začátečníkům jednoduché experimenty. Pro pokročilejší - slouží jako hlavní modul, který se využívá i ve složitějších programech. Její instalcae je popsána v https://www.octopuslab.cz/micropython-octopus/
Objekty
-> instance – metody – parametry
Všechno v Pythonu je objekt. Základní vlastnost objektů je to, že obsahují jak data (informace), tak chování – instrukce nebo metody, které s těmito daty pracují.
WS- RGB barevná LED dioda
Displeje
Další zajímavé informace
- Ukázky dalších importů, složitějších konstrukcí. Některé akce mohou při špatném provedení být „destruktivní“ – zničí se základní FW systém a bude nutno provést znovu celou inicializaci systému od esptool.erase + flash.micropython… až po rozbalení a nakonfigurování.
Ale NE – neuvedeme zde příklady: „toto nedělejte“ 😛
Ukázky web – api
Bez dalšího komentáře uvádíme některé naše ukázky, na kterých vysvětlujeme možnosti vzdáleného připojení ale především rizika připojení nezabezpečeného - některé metody dostupné v octopus() - a následně ukázková stránka na našem serveru: >>> getApiJson() http://www.octopusengine.org/api/onoff.php on/off - nezabezpečeno, GETem, bez ID - bezpečnostní chyby message - POSTem, MD5(UID), "device" jen pro kontrolu >>> getApiText() https://octopusengine.org/api/text19.php trochu lepší - https, zabezpečeno alespoň s heslem ) ale "veřejným" a také už dbáme na ID zařízení, které může sloužit i jako heslo pro přístup do "IoT sítě" (proto UID pokud nemusíme - veřejně neuvádíme) >>> SetApiValue() připravujeme, ale můžete si zkusit sami - aktuální hodnoty (nebo i log či instalované verze systému) pak uvidíte v aplikaci - zatím je to ve fázi hrubé rozpracovanosti: https://www.octopusengine.org/api/last.php
Máme vlastní otestovanou binárku Micropythonu – snažíme se držet aktuální: https://www.octopusengine.org/download/micropython-octopus1907.bin
Odkazy
Pro zvídavé pár dalších odkazů:
http://docs.micropython.org/en/latest
http://docs.micropython.org/en/latest/esp32/quickref.html
https://github.com/micropython/micropython
https://github.com/micropython/micropython-lib
https://github.com/mithru/MicroPython-Examples
https://www.hackster.io/projects/tags/micropython
https://docs.pycom.io/gettingstarted/programming/examples