Už pár let se věnujeme elektronice a programování, kde kybernetika a robotika tvoří viditelnou oblast zájmu.
V následujícím článku vás seznámíme se našimi projekty robotických vozítek:
- R02 – robot – sledující čáru nebo okraj „místnosti“
- R05 – dálkově ovládaný robot – pomocí BLE, mobilní aplikací nebo samostatným ovladačem
- Robík – částečně autonomí robot – náhodně projíždějící prostorem a vyhýbající se překážkám
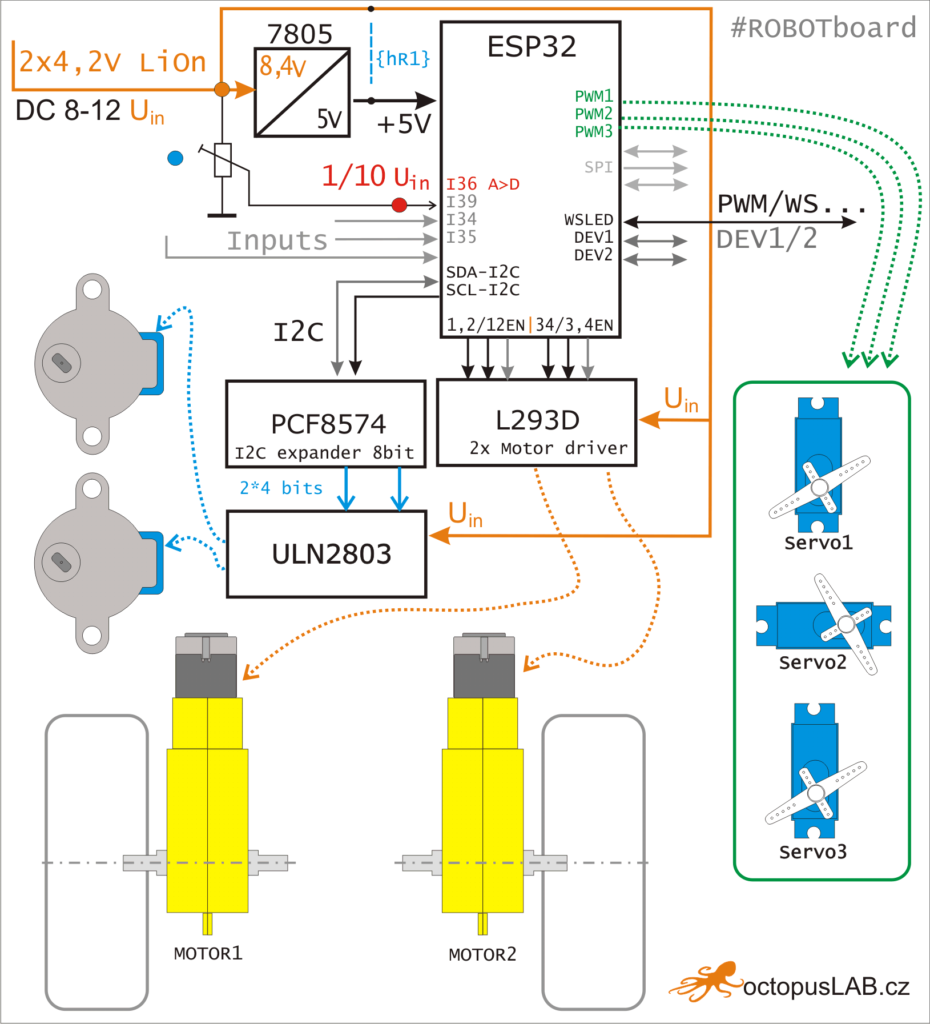
Společným jmenovatelem všech zmíněných projektů je platforma octopusLAB – a to přesněji vývojová deska ROBOTboard s ESP32. Zaměřujeme se na Micropython, ale zkoušíme i jiné programovací jazyky. Jeden z robotů byl programován v Arduino C.
V běhu máme ještě pár obdobných a souvisejících projektů, na jejichž vrcholu by měl být modulový robot Kubík, u kterého máme v plánu použít i „počítačové vidění“ (kamera + Raspberry Pi) a nějaké pokročilejší technologie (například interakce ve virtuální realitě a vyhodnocení dat s využitím umělé inteligence).

Jelikož vývoj robotických vozítek není naší hlavní náplní, pro nedostatek času a zájmu dalších nadšenců končíváme v první pracovní verzi „proof of concept“. To že se z Alfy (našeho interního projektu) stane pokusná Beta, to ještě neznamená, že už je vše vychytané, odladěné a vymazlené.
- vychytané – bez chyb
- odladěné – implementovány všechny záklaný vymyšlenosti
- vymazlené – má to i něco navíc a je to pecka!
Naše cílové projekty nejsou jednoduché. Chceme propojit elektroniku, internet věcí, robotiku s virtuální realitou a umělou inteligencí. Protože nechceme zamrznout u „sledovače čáry“, potřebujeme postupovat rychleji. Pro efektivnější programování máme knihovny a moduly – chybělo nám něco podobného pro jednoduchý i pokročilejší hardware.
Robot board

Plošný spoj je navržen přednostně pro realizaci jednoduchého robotického vozítka. Kromě dvou DC motorků může ovládat i dva malé přesné krokové motory a tři serva. Ale ukázalo se, že velmi dobře slouží jako univerzální rozhraní pro ESP32 k celé řadě dalších projektů. Zatím testujeme možnost osadit si jí podle potřeby – proto jsou součástky „větší“ (integrované obvody v DILu)
…
Podvozek – R01 Robík
DIY – Laser, Merkur, Totem, Karabička
dvoukolový – DC levné motory, ale i „profesionálnější“
h-můstek
Některé podklady a odkazy:
https://github.com/octopuslab-cz/octopus_ROBOT-R01
1. R02
Robotická soutěž – video
Robíci a Matěj
C
Program:
2. BLE
DC – BLE-BLE
Honza
knihovny Micropythonu
Základní verze programu v Micropythonu:
https://github.com/octopuslab-cz/ble-rc-robot
3. Robin
Vašek
Program:
https://github.com/octopuslab-cz/robin